Efficient traffic control and management of large-scale transportation networks still remain a challenge both for traffic researchers and practitioners. Over decades, control strategies have been proposed and applied for isolated or coordinated intersections in arterials. In this microscopic level, a novel research direction is to derive optimal control strategies for signalized intersections during undersaturated and oversaturated conditions, and they can be applied in real-time with queue length feedback control if queue length sensors are available. These strategies usually utilize disaggregate traffic flow models, as behavior of each vehicle is modeled in detail, e.g. car following and lane changing models. However, modeling the traffic flow dynamics of each element in a large-scale network with a large number of links and intersections is a complex task. One has to model the evolution of queues at each signalized intersection, and to account for the queue dynamic interactions between adjacent intersections. Hence, instead of this approach, the macroscopic fundamental diagram (MFD) aims at simplifying the micro-modeling task of the urban network where the collective traffic flow dynamics of subnetworks capture the main characteristics of traffic congestion, such as the evolution of space-mean flows and densities in different regions. The MFD provides a unimodal, low-scatter relationship between network vehicle density (veh=km) and network space-mean flow or outflow (veh=hr) for different network regions, if congestion is roughly homogeneous in the region. The MFD can be utilized to introduce elegant real-time control strategies to improve mobility and decrease delays in large urban networks, that local ones are unable to succeed.
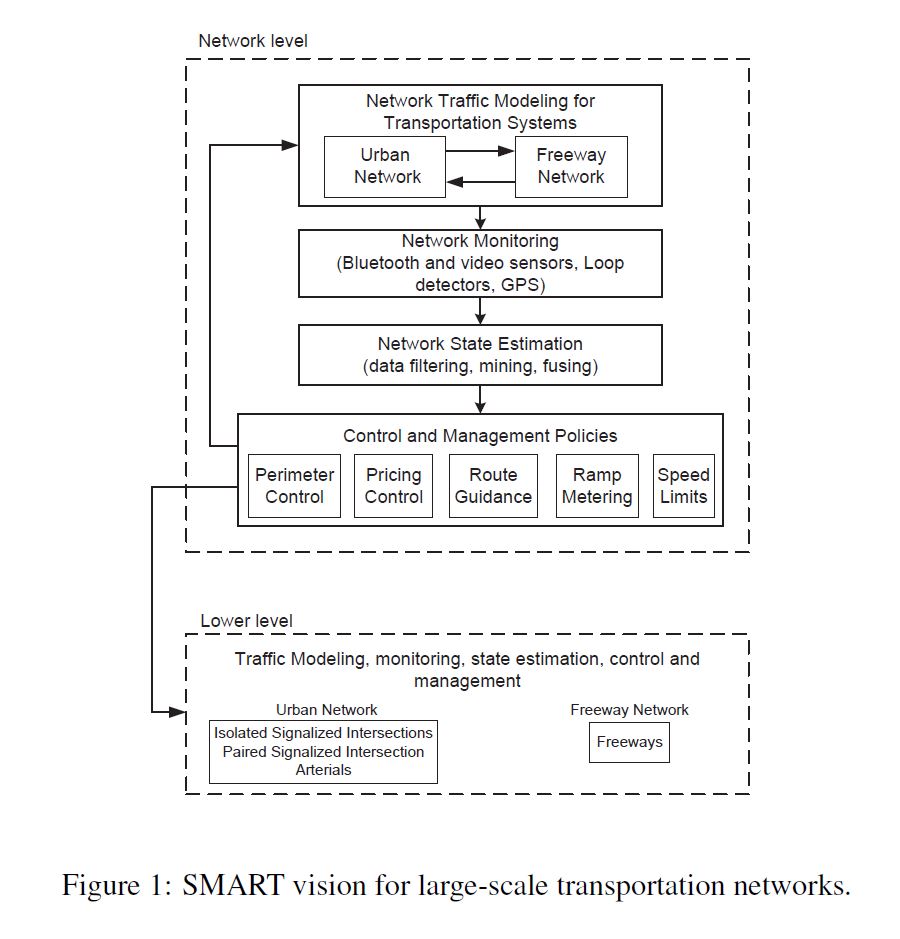
The main objective of the SMART project is to develop smart transportation systems for large-scale traffic networks that aim at minimizing network delays and increasing sustainable mobility and accessibility, with the help of feeded data from advanced sensor and information technologies. To achieve this goal, we are developing a new interdisciplinary research approach that combines and fuses research areas developed in different fields in traffic theory, control theory, optimal control, big data fusing, and estimation theory. The new approach integrates two schemes, as shown in Fig. 1: (i) a hierarchical scheme with network and link (or intersection) levels, and (ii) a real-time closed-loop scheme applied in each level. In the SMART project we focus on developing the new interdisciplinary approach in four research directions: modeling, monitoring, estimation, and control and management of large-scale transportation systems, see Fig. 1. We believe that the new interdisciplinary approach will eventually result in a better understanding of complex and congested cities, and will allow integrating traffic control and management approaches to generate smart cities that are more livable and sustainable.
Research in the first two years of the project focused on enhancing the modeling and control at the two levels. First, we considered the problem of traffic routing and signal control in simple networks. The drivers seek for better routes and the signal control reacts to link flow changes corresponding to the routing decisions.The proposed problem combines the modeling of routing and traffic signal control, and the derived analytical solutions shed some lights to have a better understanding of routing and control interactions. Unlike previous works, this project considers dynamic transient periods, rather than steady-state periods or equilibrium conditions.This means that the current research considers the optimal control synthesis for bringing initial queue lengths at an intersection to a predefined steady-state or equilibrium queues, by manipulating traffic routing and signal-control inputs.
A second research effort focused on the network level. Recent works have introduced perimeter feedback control strategies for a homogenous urban region and multiple urban regions with the help of the MFD representation. The perimeter controller is located on the region border, and manipulates the transfer flows across the border, while aiming at regulating around (nearby) the critical densities or accumulations, whereby the system throughput is maximized. Recent contribution of the SMART project is designing a robust perimeter controller for an urban region. The controller aims at satisfying the control specifications and having a good performance for the whole accumulation set, uncongested and congested accumulations, and not necessary for a value range nearby the critical accumulation set-point. Comparison results show that the performances of the robust controller are significantly better than a “standard” feedback controller, for different traffic scenarios. Moreover, in order to accommodate uncertainties and take into consideration the restrictions on the available information, ongoing research deals with the adaptive perimeter control problem for multi-region MFD systems, which have an interconnected structure composing several homogeneous regions. Unlike previous works that assume centralized approach, where feedback informations are needed from all urban regions, in this research we follow a coordinated distributed control approach, where regional control laws are developed depending on (i) real on-line local information of the region, i.e. regional accumulation and its perimeter control input only, and (ii) reference signal information forwarded to all distributed perimeter controllers by a high level coordinator controller.
Ongoing research addresses the challenge of using identified-sampled data, and combining it with loop detectors data, for monitoring and controlling traffic flow in urban signalized arterials. This is not an easy task, not only because of (possibly low) penetration rate, but also because the flow of vehicles travelling in arterials has high level of variability, due to frequent stops at signalized intersections and turns from one road to the other. Yet, the research is still immature and many research questions are still open. Our main question in this area is : How can identified-sampled data be utilized not only for state estimation or prediction purposes, but also for real-time traffic signal control in arterials, with or without other types of data? Our future research aims to shed some light.
The SMART project will evaluate and test the hierarchical modeling and the closed-loop control at each level, both theoretically and empirically. Therefore, we must build a transportation sensory network consists of urban links and a freeway system. This task is complex and challenging both technically and financially, and it is a crucial step in the research area of large-scale transportation networks. Up to this day, there is still no proof of real-time hierarchical control concept for large-scale network utilizing macroscopic model-based (MFD) networks and feeded data. Towards proof of the control concept for large-scale transportation networks utilizing MFD-based modeling and feeded data, the SMART project already deployed 39 Bluetooth sensors in Tel Aviv traffic network, and in the near future, we aim at deploying more sensors to facilitate the network for implementing and testing the developed control strategies in the SMART project at the Tel Aviv urban network.